Robot control through silkmoth brain activity
Silkmoth brain-robot fusion system
For
investigating how adaptive processes at the behavioural level are
controlled by neural activity in the brain, we designed a robot
that is directly controlled by neural activity recorded from the
brain of the silkmoth. This is in principle a more sophisticated
version of the approach with started with the silkmoth-steered
robot, in which behavioural responses are used for robot control
(see previous topic).
The encounter of the silkmoth with odour
filaments (plumes) always induces the same routine: walking
straight, zig-zagging, and looping if time to the next interception
is long. This program is helping the moth to increase the chances
of interception odour plumes. The command signal thought to
underlie this behavioural pattern has been investigated [4,5]. The
flip-flop activity shown by some lateral
accessory lobe descending neurons representing the output of
the brain to the thoracic motor centers can be likened to an
electronic memory device, the toggle flip-flop (Figure 1). Turns
are thought to be controlled by the activity of this signal.
Currently, the generation of this signal is being intensively
studied by anatomical, physiological, and modeling modeling
approaches [4, 5, 8-13].
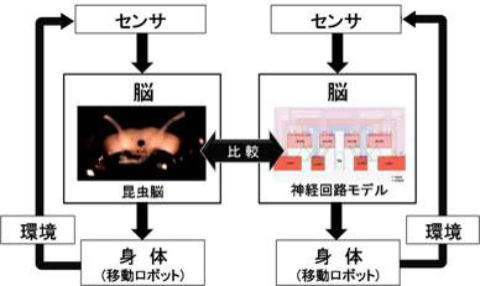
Using the flip-flop signal to control a robot is an important tool in evaluation
network models of the circuitry involved in odour-source localisation.
The control signal can be compared to the output of network models, that
should be equivalent, if correct (Figure 2).
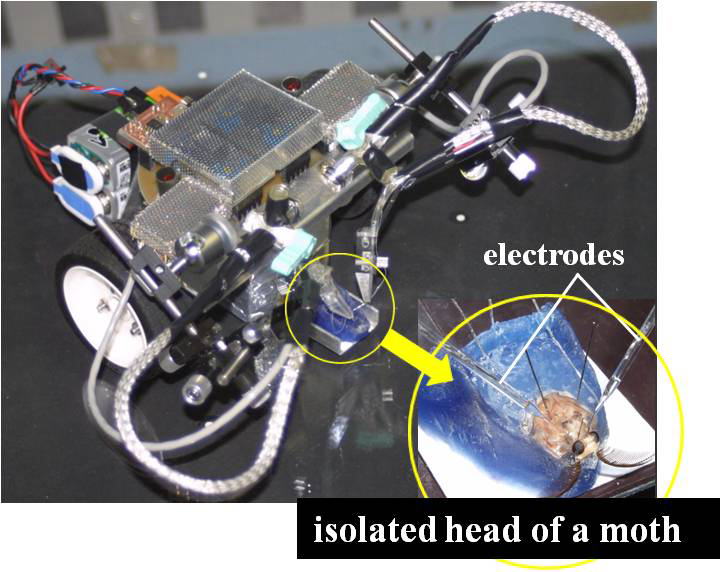
The brain of the silk moth is connected by a pair of thick nerve bundles with the prothoracic ganglion: the neck connective. The brain activity related to the control of locomotion is relayed though the neck connective but there are to many fibers in the connective to sample all the relevant ones. Since neck movements are strictly correlated with turns, the activity of neck motor neurons can be used as convenient proxy [4,5]. The neck motor neurons can be recorded reliably using suction electrodes on the second cervical nerve and the robot-mounted amplifiers without the need to interfere with the neck connective.
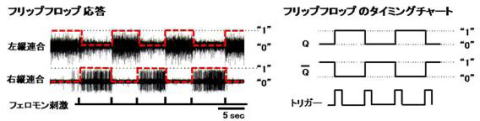
Figure 1: Response of flip-flop command neurons involved in pheromone source localisation in the silkmoth. The responses resemble the output of electronic flip-flops and are relayed to the thoracic ganglia through the neck connective.
The moth head and thorax are mounted onto a small platform and dissected as to leave the brain with antennae and compound eyes intact but to be able to record activity from the cervial nerves using suction electrodes mounted on two micromanipulators fixed to the robot. The measures signals are transferred to a PC that evaluates them and controls the motors driving the robot wheels. The brain processes sensory information in a normal way but the translation between output signals and motor commands is emulated. Using this robot, we investigate the interaction between the brain and the environment. In particular, we can evaluate how output commands change in response to changing conditions. So far, we successfully steered the robot using neural signals from the brain [13]. In the future, this kind of system is expected to be important in investigating dynamic interactions between information processing in the brain and the environment.
back