back
Insect-robot
fusion system
In
order to investigate the flexibility of insect odour-source
localisation, we use a robot steered by locomotor behaviour of the
silkmoth thus allowing us to let the system displace according to
the locomotor behaviour or to manipulate the movement in space
(Figure 4A)[3,11].
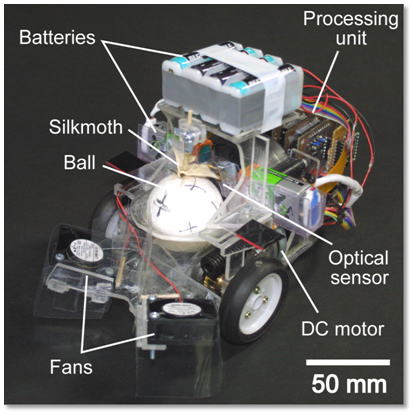
The moth is tethered and walks on an air-cushioned styrofoam sphere (50mm diameter), whose rotation is detected by an optical sensor. The optical sensor output allows to reconstruct the trajectory the moth would have taken in space if freely walking and the motors of the robot can be actuated accordingly. The maximum walking speed of the moth was 24.8mm/s and the maximum turn speed was 2.1rad/s and these could be handled by the robot [3,11].
Odour-source localisation experiments in the wind tunnel
comparing the silkmoth-steered robot with freely walking silkmoths
showed that the performance was virtually idendical.
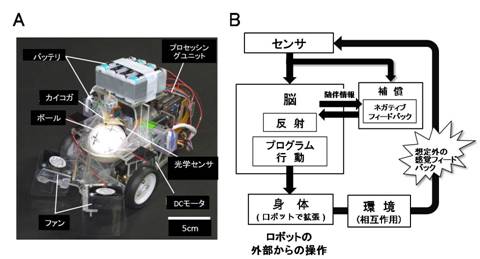
Figure 4: Moth-steered robot system. (A) Implementation. (B) Asymetric manipulation of gain in the motor drivers to introduce a rotational bias in the coupling between moth locomotion and robot movement. It could be shown that the moth has the capability to react to such change, implying a feedback control mechanism in odour-source localisation locomotor behaviour.
back
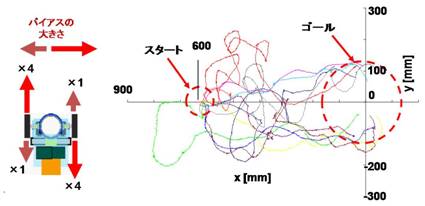
The silkmoth-steered robot is also a testbed for behavioural experiments. The gain translating silkmoth locomotion to rotation of the robot wheels could be set 0.5x lower than normal on both sides, but the moth was still capable of correct odour-source localisation steering the robot [3,11]. Afterwards, one side was kept at this setting but the other side was changed to a gain 4x higher than normal (Fig. 5). Under such conditions, small movements lead to fast rotation of the robot. The large-field visual motion induced by such movements is used by the silkmoth, that strives to stabilise gaze and will rapidly be able to prevent large-amplitude rotation. Surprisingly, after a very short time required to adjust to the new conditions, the moth could normally streer the robot to the pheromone source (Figure 5).
Thus, the silkmoth is capable to adapt its neural commands for locomotion to external influences in order to maintain its own behavioural routine, using sensory feedback. We have shown that adaptive learning and memory are possible in the silkmoth.