back
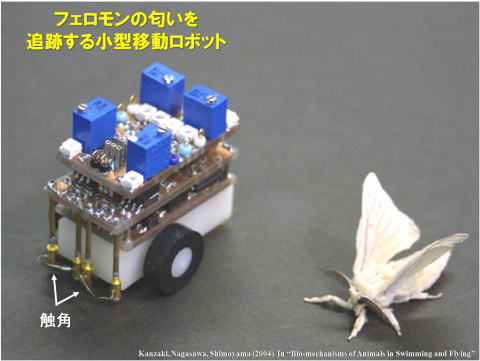
A theoretical model of the FF response controlling locomotion during odour-source localisation in the silkmoth has been derived from experimental observations. This model also incorporates known features such as transient excitation and was tested using a robot implemented in hardware dimensionally similar to the silkmoth (31 mm (L) x 18 mm (W) x 30 mm (H), Figure 14) [34]. In order to test this system in an odour-source localisation task, a highly sensitive odorant detect is necessary. Since no suitable artificial is available, we used antennae of the male silkmoth from which olfactory receptor neuron activity was recorded while being mounted in realistic (moth-like) configuration on the robot. The electroantennogram recording method allows stable recordings of suitably long periods of time. The electrophysiological recording data are digitised and fed into a CPU running software implementing the model. The algorithm could reproduce the behaviour of a silkmoth to single-pulse pheromone stimulation, consisting of surge, zig-zagging, and looping. In the wind tunnel under realistic conditions, this system could perform successful odour-source localisation just as a silkmoth (Figure 14, [34])