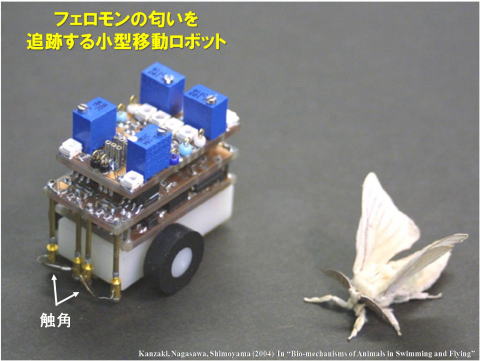
FF応答の形成機構の数値モデル(一過的な興奮応答も組み込んである)を構築し、これをもとに実際のロボットでその動作を実環境下で検証した(図14) 34)。この小型移動ロボットはカイコガと同様の匂い環境を達成するために、カイコガと同等のサイズ(31
mm (L) x 18 mm (W) x 30 mm (H))とした(図14)。フェロモンセンサーは、昆虫の触角ほど感度の高い人工のセンサーは存在しないため、雄カイコガより切りだした触角をそのまま用い、ロボットの左右に配置した。フェロモンを受容した際に生じる触角基部と先端の電位差(触角電図)を匂い情報として利用した。ロボットから得られた触角電図は外部のコンピュータへ送られ、左右の触角の受容タイミングを加味した神経回路モデルにより得られた制御情報をロボットに転送した。フェロモンを一過的に与えることにより、このロボットはカイコガと同様に直進、ジグザグターン、回転の動作を示した。そこで、実際に風上にフェロモンを配置した風洞中でこのロボットの動作を検証したところ、直進、ジグザグターン、回転を繰り返して、フェロモン源に定位することができた(図14)34)。ロボットが実際の環境下において匂い源に定位したはじめての瞬間である。