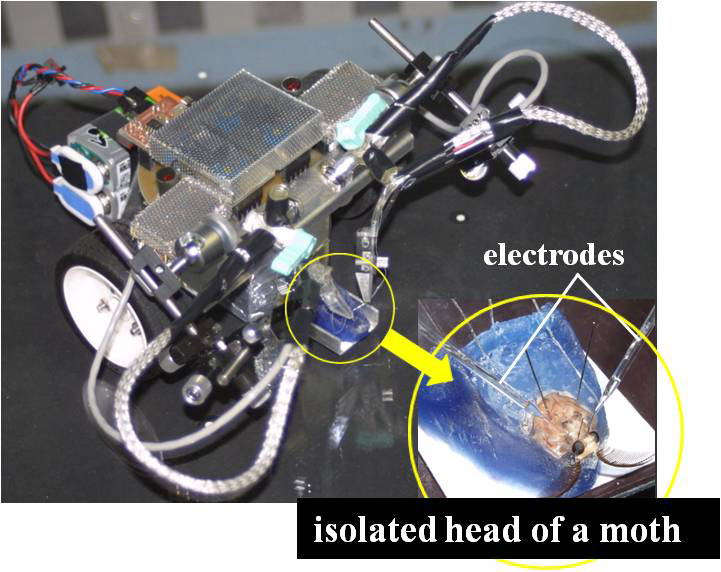
この昆虫脳操縦型ロボットでは,触角や複眼のある頭部をロボットに固定し,左右1対のマニピュレータに固定したガラス電極で行動指令信号を計測した.計測した信号はアンプを通してPC
に入力し,モータを制御することで左右の駆動輪を回転させ動かした.つまり感覚入力から脳内処理までは,昆虫そのものにより正常に処理されるシステムである.このロボットを用いることにより,環境と脳・身体の相互作用を考慮したうえで,行動を修飾する「慣れ」や,昆虫操縦型ロボットで行ったような想定外の感覚フィードバックに対する「補償」などにより,脳の出力信号がどのように変化していくかを経時的に計測できることになる.
これまでに,フェロモン刺激によって生じた行動指令信号によりロボットを動かすことに成功している[13].今後,昆虫脳操縦型ロボットは,脳の内部状態によりダイナミックに変化する神経回路モデルを構築する上で重要な知見を提供するものと期待している.
昆虫脳操縦型ロボット
カイコガの脳と人工身体の融合
直接的に脳機能による適応能力を解明するために,カイコガの脳から出力される行動指令信号によって直接駆動されるロボットを製作した.このロボットを「昆虫脳操縦型ロボット」(上図)をよぶ.
カイコガは匂いのフィラメントに遭遇するたびに,直進・ジグザグターン・回転を繰り返すことで,匂い源を探索する.この定型的な歩行パターンの生成に関わる行動指令信号は,すでに明らかにしている[4,
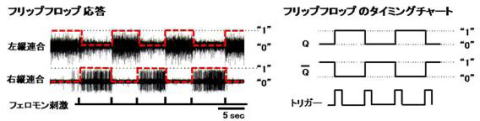
5].この行動指令信号によりカイコガが行おうとする行動を推定することができる.この行動指令信号は,コンピュータの記憶素子の“フリップフロップ”と類似の特徴をもつ神経信号であることから「フリップフロップ信号」といわれ,脳内の神経回路によって形成され縦連合を介して,脳から胸部神経節に伝達される
(図1).これによりプログラム化されたジグザグターンや回転歩行が発現する.この特徴的な神経信号は脳内の前運動中枢といわれる領域(
側副葉)で生成される.その領域を構成するニューロンの構造と機能の網羅的分析が進められており,基本的な神経経路については明らかになり,
神経回路モデルが提案されている[4, 5, 8-13].
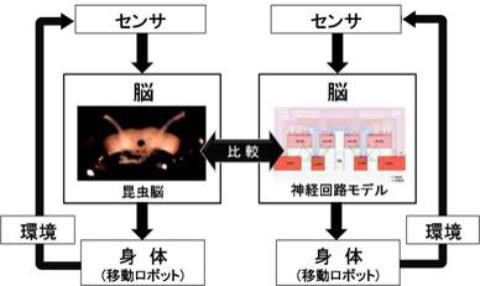
ここでは,移動ロボットの制御信号としてフリップフロップ信号を使うが,これはこの神経回路モデルの出力信号でもある.したがって,もし神経回路モデルが脳内の正しい神経回路(構造)と機能を反映していれば,その出力は脳から出力される行動指令信号と一致するはずである.つまり,神経回路モデルの正しさを評価できることになる
(図2).
カイコガの脳からは太い1対2本の縦連合といわれる神経束が胸部神経節に伸びている.この神経束を介して,歩行の実際の運動パターンを作る胸部神経節にこの行動指令信号が送られ,ジグザグターン,回転の歩行がおこる[4,5].ただし,脳と胸部神経節を結ぶ神経束は数百本の神経線維を内包するため,目的とする行動指令信号を担う神経線維の活動を安定して計測することが難しい.そのため,行動指令信号を運ぶニューロンが接続し,行動と強い相関のある頸の回転運動を制御する運動神経の活動を計測し,行動指令とした[4,5].カイコガはフェロモンによりおこるジグザグターンや回転により方向を転回するとき,それに同期して頸の方向も回転させることが明らかになっている[4].具体的には,5本の運動神経を含む第二頸神経(頸運動神経)と呼ばれる神経束をガラス電極で吸引し,生体アンプを通してその活動を計測した.
図2.昆虫脳操縦型ロボットは「脳そのもの」から出力される行動指令信号によって駆動される.神経回路モデルが脳内の正しい神経回路を反映すれば,その出力は脳から出力される行動指令信号と一致する.両者を比較することで,神経回路モデルの評価とともに,より脳の構造と機能に近いモデルの提案が期待できる.