Insect Robot Hybrid System
生物の環境適応能理解のための新しいアプローチの必要性
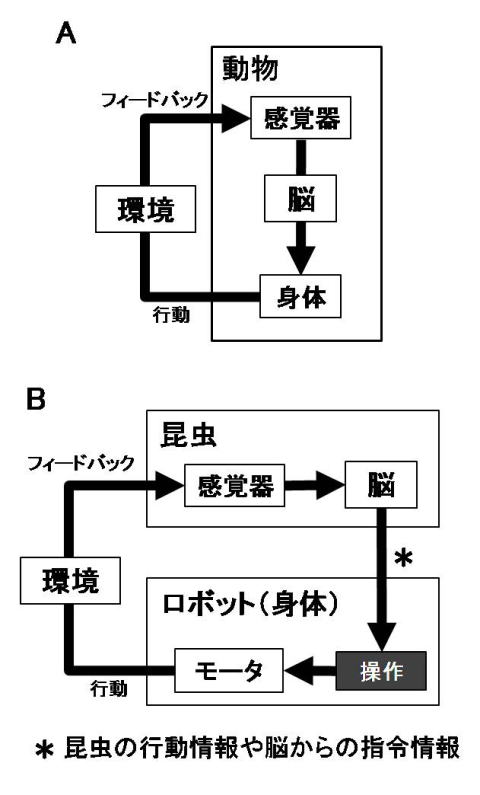
生物は時々刻々と変化する環境下で,単純な反射から,定型的行動,さらには学習行動や認知行動など,多様な行動を示す.このような行動は,生物をとりまく環境とその情報を受容・処理する感覚器(センサ)・脳,そしてその信号により行動をおこす身体を含めた三者の相互作用を介して,進化してきた(図1).生物の適応行動には,常に変化する環境下においてタスクをこなし,生存する上でのさまざまな問題解決法が内在する.生物が環境下でどのような感覚情報を,いかに捉え,処理し,そして行動を発現するかの解明は,生物がもつ適応能力のしくみを理解する上で,また,適応能力(知能)を有した機械システムを構築する上できわめて重要な指針を与える.
生物の行動発現機構の研究はこれまで,脳機能に重点がおかれ,その構成素子であるニューロンの構造と機能を要素還元論的に分析し,それを再構築することにより理解するというアプローチが取られてきた.しかし,脳全体がひとつのシステムとして機能し,行動が環境と脳と身体の相互作用により解発されることを考えれば,これまでのボトムアップ的な手法のように脳を環境や身体から切り離して,要素を積み上げるような手法のみでは,行動発現の神経機構を理解することは困難である.つまり,脳を構成する素子であるニューロンの構造と機能から再構築した神経回路モデルから,いかに脳機能を推定したとしても,その神経回路モデルの正しさの検証が困難なため,適応行動の生成機構をとらえるには限界がある.
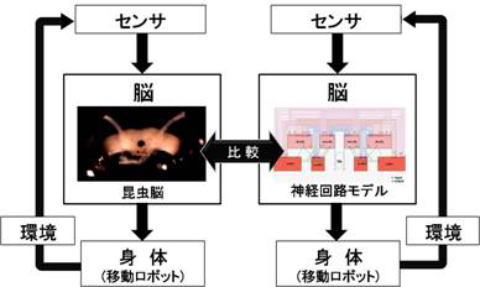
そこで,このようなボトムアップの研究を補完し,適応能力そのものを評価したり,ボトムアップ的研究から構築した神経回路モデルを比較・検証できる実験システムが必要となる(図2,3).われわれはこのような要望にこたえるため,新たなアプローチとして「昆虫-機械融合システム」を提案した.
図2.生物-機械融合システム.(A)動物の行動は,環境・脳・身体のループにより起こる.(B)生物-機械融合システムの考え方.
雄カイコガ (Bombyx mori) は,雌の性フェロモン刺激によって,明瞭な本能行動であるフェロモン源定位行動を発現する.カイコガの雄は,雌の出す性フェロモンを感知すると,翅を羽ばたかせながら,まず少し前進(直進歩行)した後,左右に2,3回ジグザクに動き(ジグザグターン),最終的には回転 (回転歩行)する定型的な行動パターンを発現する.この一連の行動中に,再びフェロモン刺激を受けると,行動パターンはリセットされ,再び直進歩行からこの行動パターンを繰り返す[1].
匂いは,空中に不連続にパルス状に分布し,その分布状態を時々刻々と変えている.つまり,昆虫はこのような環境下で複雑に変化する匂いの分布状態に依存して,行動パターンのセット・リセットを繰り返すことにより,巧みに匂い源への定位に成功しているのである[1,10].このような行動を解発するカイコガの脳内の神経回路は,遺伝子・
ニューロンさらに脳領域にいたるさまざまな階層から徹底的に分析研究されている [1-7].また,脳を構成するニューロンも数万個程度と比較的少なく,カイコガは適応行動のしくみをニューロンレベルからボトムアップ的に研究する上で優れた研究対象となっている.
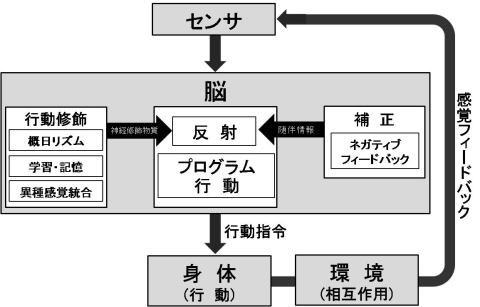
一方,カイコガの定位行動の解発閾値や行動パターンは,視覚刺激や匂い刺激などの外部環境, さらにはサーカディアンリズムや匂いの経験(特に慣れ)による内部環境の変化により,ダイナミックに修飾される[2,12].このような外界との相互作用や内部環境の変化などを利用し,カイコガは時々刻々と変化する環境下で適応的な行動を発現するものと考えられる(図1).
生物の環境適応能理解のためのモデルとしての昆虫
地球上には,われわれヒトも含め,数百万種類もの生物種が生息する.なかでも,昆虫はその7割以上を占め,もっとも多様な生物グループである.
匂いは空中に分布し,分布状態を絶え間なく複雑に変化させる.このような常に変化する環境下で,昆虫は数キロメートルにもわたる匂い(フェロモン)源定位を実現している.これは,ファーブル昆虫記にも記された有名な話である.我々が暗闇でかすかな匂いをたよりにそのありかを探し出すことを想像すると,昆虫がいかに困難な問題を解決しているかがわかる.これは工学分野ではCPT(Chemical Plume Tracking)といわれるきわめて解決が難しいとされる問題の一つとなっている.匂い源定位は,昆虫が環境との相互作用,行動修飾,感覚フィードバックを通していかに行動を発現し,その問題を解決するかを示すよい例となる.
昆虫-機械融合システム構築の目的
動物は動くことにより常に新たな環境情報を受容し,その情報は脳により処理され,身体を駆動する.それによりまた新たな環境情報が受容される.この環境・脳・身体のループを介して脳は常にその状態をダイナミックに変化させる.適応行動は,このような三者の関係から生成されると考えられる
(図1,2).そこで,このような適応能力を評価するアプローチとして,「昆虫-機械融合システム」を提案する.
すなわち,環境・脳・身体において,身体を移動ロボットに置き換えることを考える
(図2).この置換により,昆虫の身体による移動をロボットに正確に反映できれば,昆虫の身体は,移動ロボットに置き換わり,環境・脳・身体のループにロボットを介在させることができる.また,このロボットの移動は人為的にも制御することができるので,昆虫の移動により生じる感覚フィードバックを自由に操作することが可能となる.つまり,昆虫が生成する移動量と異なる量でロボットを制御したり,あるいはまったく異なる方向への移動を人為的に作り出すことで,昆虫に想定外の感覚フィードバックを与えることができる.環境と身体のループを介して脳が機能するのであれば,感覚フィードバックの操作がどのような行動変容をもたらすかを計測することによって,昆虫の適応能力の評価ができるはずである
(図2).さらには,神経回路モデルの精緻化も可能となる
(図3).
そこで,そのような条件を満たす実験系として,「昆虫-機械融合システム」を構築した.そのひとつは,移動ロボットを制御するコントローラが,「昆虫」そのものである「
昆虫操縦型ロボット」,他方は,昆虫の脳から出力される行動制御信号,すなわち昆虫の脳そのものをコントローラとして動く「
昆虫脳操縦型ロボット」である.
図3.昆虫脳操縦型ロボットは「脳そのもの」から出力される行動指令信号によって駆動される.神経回路モデルが脳内の正しい神経回路を反映すれば,その出力は脳から出力される行動指令信号と一致する.両者を比較することで,神経回路モデルの評価とともに,より脳の構造と機能に近いモデルの提案が期待できる.