昆虫パワーの背景にある感覚・脳・行動のしくみは、私たちヒトの感覚や脳の仕組みを知る上での優れたモデル(研究対象)となるばかりではなく、かしこいロボットや生物のように振舞うことのできるロボットを設計するうえでもおおいに注目されているのです.昆虫のセンサや脳のはたらき,さらにその身体の構造には学ぶべきことがたくさん含まれているのです.昆虫パワーを生む感覚・脳・行動の解明は、今後の科学技術のイノベーション創出の鍵となってくるでしょう。
ファーブル昆虫記の最終巻が出版されて100年が過ぎ、昆虫パワーの理解が,生物学,情報学,数理科学、そして工学をあわせた研究により飛躍的に進みつつあります。
本プラットフォームはこのような背景の中、無脊椎動物、特に昆虫の感覚・脳・行動に着目し、神経生理学、神経行動学、行動学に関する実験データ、数理モデル、研究のためのソフトウェアツール、さらには計測装置の製作法などの情報の共有を目指しています。無脊椎動物の種類数はひじょうに多いため、このプラットフォームでは、カイコガを中心に、コオロギ、ルリキンバエ、ミツバチ、ゴキブリ、アリ、ザリガニを対象として、それぞれを研究対象としている研究者(委員)が提供する実験データや数理モデルなど利用価値の高いリソースをデータベース化し、その共有を進めています。また、これら以外の種についても研究者の協力あるいは論文情報をもとに収集を進めています。したがって、昆虫の感覚・脳・行動について、種間で比較できることがこのプラットフォームのおおきな特徴の1つとなっています。
本プラットフォームでは、各種の無脊椎動物の感覚・脳・行動に関するデータベースを直接利用できるとともに、感覚・脳・行動に関する解説をおこない、解説内容とデータベースが連携されているので、実際の研究データを参照しながら内容を理解できるように工夫されています。このプラットフォームは、図1に示すように、昆虫を神経科学の立場から活用されたい方、昆虫の機能を工学的に応用されたい方、あるいは動物の感覚・脳・行動について知りたい方、また、具体的にデータや実験を踏まえて教育に活用されたいみなさんが利用しやすいように、それぞれの立場から利用いただけるように、4つの入り口を設けています。
1.無脊椎動物の感覚・脳・行動データベースの扉
2.研究の扉(感覚・脳・行動の比較行動生理学)
3.機能利用の扉
4.教育の扉
本プラットフォームを活用されることで、昆虫の感覚・脳・行動について、正しくご理解いただけるとともに、研究・応用・教育に活用いただければと思います。
無脊椎動物脳プラットフォーム委員会メンバ(2010年度)
代 表:神崎 亮平(東京大学)
幹 事:池野 英利(兵庫県立大学)
委 員:青沼 仁志(北海道大学)
高畑 雅一(北海道大学)
志賀 向子(大阪市立大学)
竹内 浩昭(静岡大学)
藍 浩之(福岡大学)
市石 博(東京都立国立高校)
鍋田 修身(東京都立豊島高等学校)
前委員:水波 誠(北海道大学、前東北大学)
松井 伸之(兵庫県立大学
横張 文男(福岡大学)
泰山 浩司(川崎医科大学)
協力:髙嶋 聰、加沢知毅、並木重宏、ハウプトSS(東京大学・神崎研究室))
第一回委員会コメンテーター:
伊藤啓(東京大学)、佐々木 謙 (金沢工業大学)、木原 章(法政大学)、竹内 秀明(東京大学)
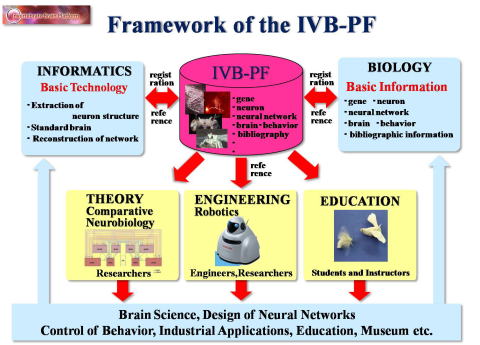
図1.主に昆虫の感覚,脳,行動の神経機構に関する情報を計算論的神経科学,ロボティクスなどの産業利用,
さらには教育分野で有効に活用するためのプラットフォームを,研究者,高校教員,博物館の学芸員の協力により進めています.